Here you can find some of my projects. I hope you will appreciate!
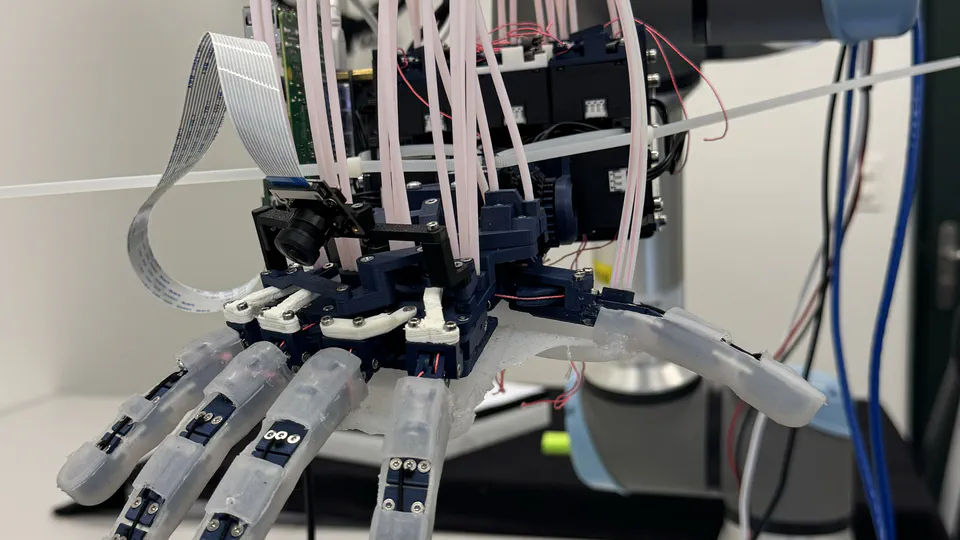
Implementation of an Neural Network based EMG decoder for hand prosthesis, robust to time-varying muscle signal properties due to muscle fatigue. Python code based on Gaussian-Mixture Models and Biomedical signal processing and filtering techniques.
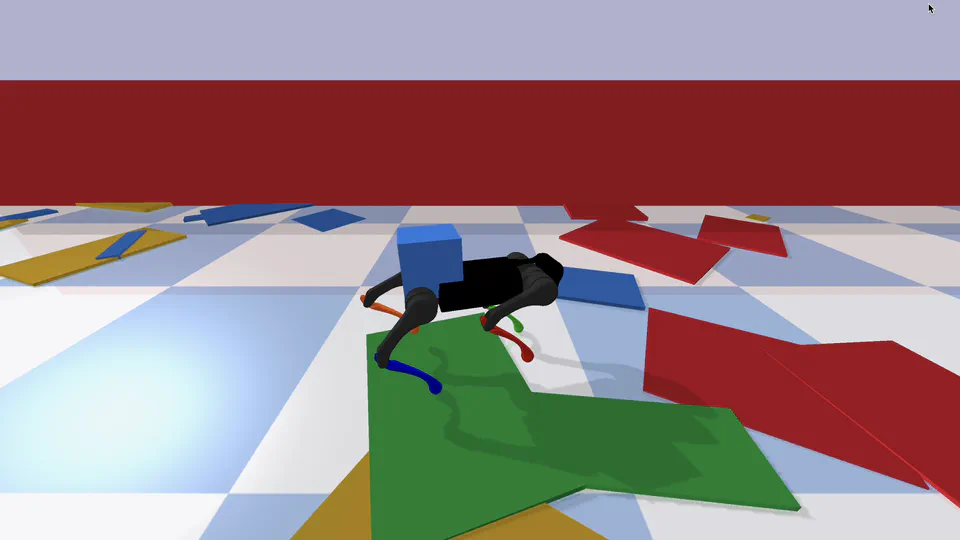
Implementation of locomotion controllers based on Central Pattern Generators (CPG) or Deep Reinforcement Learning for a quadruped robot. RL policy is developed using MuJoCo for simulation and PPO for training.
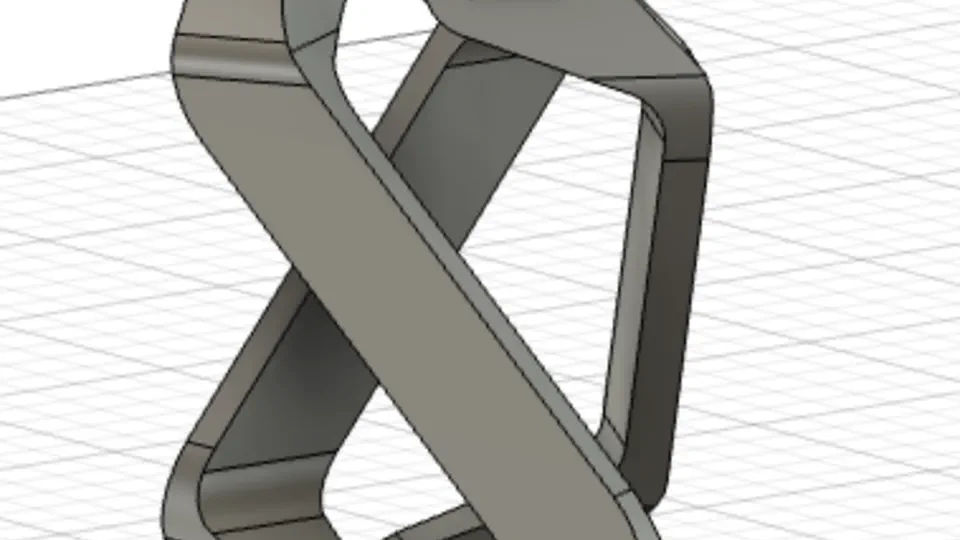
Design of a robotic knee joint replicating key biomechanical functions of the biological knee. The powered knee is based on a Virtual Rolling Sphere contact mechanism, and through an optimization routine coupled with a parametric CAD is able to adapt to any size requirements.