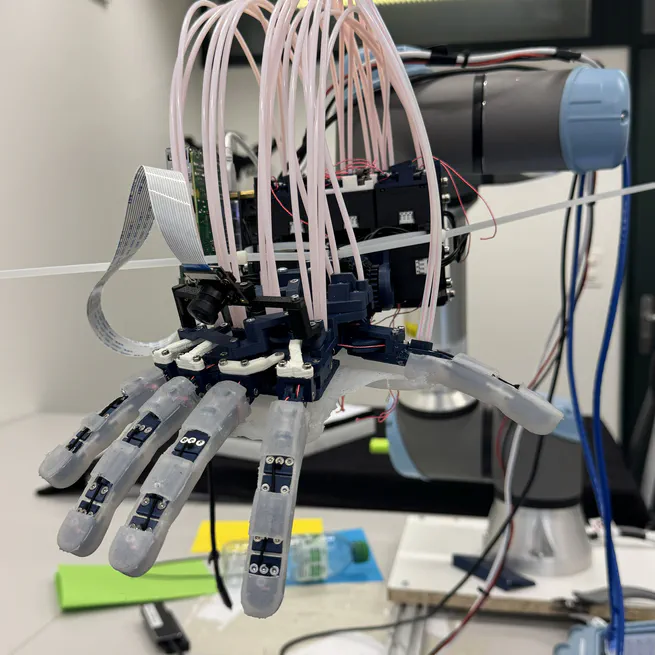
Impact of Muscle Fatigue on Neural Network based EMG decoder for Hand Prosthesis
Implementation of an Neural Network based EMG decoder for hand prosthesis, robust to time-varying muscle signal properties due to muscle fatigue. Python code based on Gaussian-Mixture Models and Biomedical signal processing and filtering techniques.
Jan 31, 2025
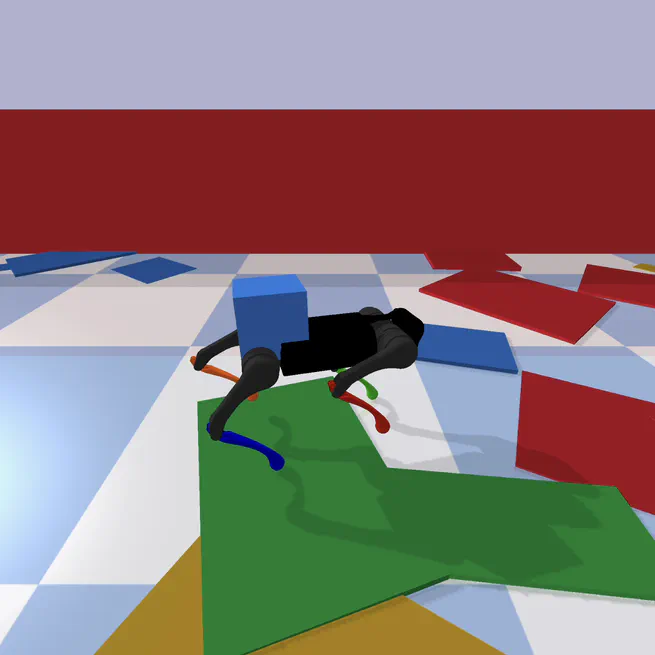
Quadruped Locomotion with Central Pattern Generators and Deep Reinforcement Learning
Implementation of locomotion controllers based on Central Pattern Generators (CPG) or Deep Reinforcement Learning for a quadruped robot. RL policy is developed using MuJoCo for simulation and PPO for training.
Oct 26, 2023
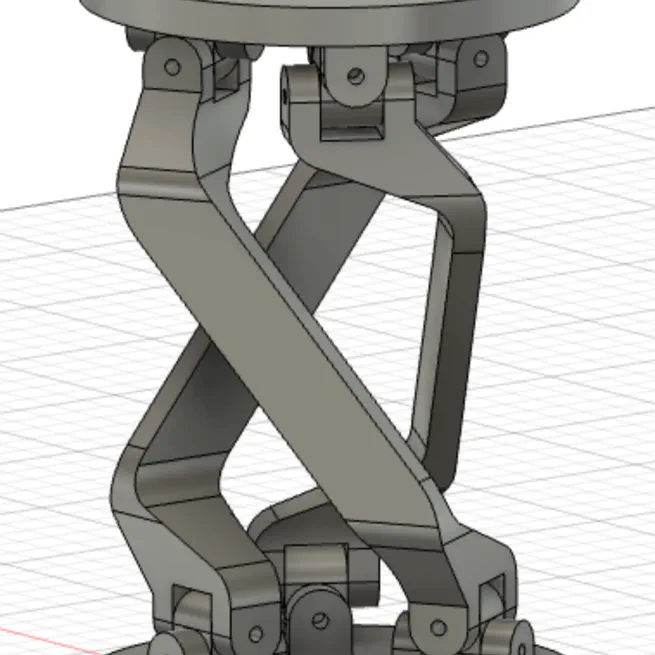
Design of an Actuated Virtual Rolling Sphere Knee Joint
Design of a robotic knee joint replicating key biomechanical functions of the biological knee. The powered knee is based on a Virtual Rolling Sphere contact mechanism, and through an optimization routine coupled with a parametric CAD is able to adapt to any size requirements.
Mar 14, 2023